 ✕
✕
虚拟仿真开发工具
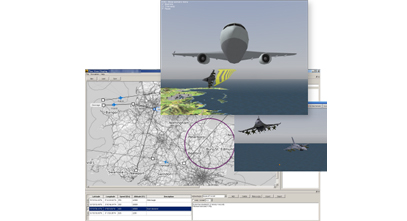
RTDynamics(Real Time Dynamics)仿真平台是高逼真度动力学建模和实时仿真开发的全球主要解决方案之一。其中包含的旋翼飞机和固定翼飞机实时仿真模块RotorLib和FixedWingLib是目前国内外速度和精度高的飞行器实时仿真平台。开发人员可以在Windows或Linux系统中通过C++应用程序接口来实现实时仿真,也可以通过修改XML文件进行动力模型的自定义配置。
RotorLibCGF主要用于无人直升机的实时动力学模型:飞行状态的保存和加载、无人机低级飞行特技命令、无人机高级飞行特技命令、地形轮廓跟踪能力等。RotorLibFDM主要用于飞行设备训练、模拟器开发以及工程仿真、高度逼真的直升机仿真模型、模型和控制系统。FixedWingLibCGF主要用于无人机的实时动力学模型、用户自定义飞行动作、空战特技动作、飞行状态的保存和加载、确定状态模拟、开放灵活的C++ API等。FixedWingLibFDM主要用于飞行设备训练、模拟器开发以及工程仿真、不同组件之间的气动干扰模拟、高度逼真的直升机仿真模型、模型和控制系统采用可修改二进制格式保存(XML)、高度真实的起落架模型(刚度阻尼、转向、制动)等。
RTDynamics的产品分为以下几个模块:
1、旋转翼飞机飞行动力学库--RotorLib
直升机计算机生成兵力模型——RotorLib CGF
高逼真度的直升机飞行动力模型——RotorLib FDM
动力学模型Matlab中的扩展——RotorLib FDM for Matlab
VR-Forces中的RotorLib插件——RotorLib for VR-Forces
2、固定翼飞行动力学库--FixedWingLib
FixedWingLib CGF——飞机格斗策略模型
FixedWingLib FDM——飞机六自由度动力学模型
基本特点:
1、动力学模型
多样的操纵控制策略
高逼真度的飞行动力学模型
2、仿真过程
支持仿真状态的保存和载入
支持仿真暂停、仿真加速和减速
确定性仿真模型(可重复设定状态)
3、自由配置
通过XML文件实现动力参数和控制参数的所有配置
可扩展的模型架构
4、快捷便利的使用环境
方便使用的C++应用程序接口
多达80架次的单机仿真能力
适用于Windows和Linux操作系统
详见客户案例
详见官网:http://www.rtdynamics.com/v3/